Workspace Setup for Telerobotics
Siddhant Shrivastava
May 26, 2015
Filed under “GSoC”
Hi! Yesterday was the start of the coding period which will continue for another 12 weeks. The Community Bonding period gave me enough time to install the required packages. This post explains those packages in minimal detail.
Project Components
My work would heavily require the use of -
- ROS (Robot Operating System) to work with the Husky Rover

ROS is the meta-operating system which is very popular with roboticists. My future posts would describe my work with ROS and the concepts that I am using, in detail.
More specifically, I am working with ROS Indigo Igloo, which is a LTS (Long-term support) release

- Gazebo Simulation environment to test the programs written to drive the Husky around

I am working with Gazebo version 2.2.3.
- Tango-Controls Supervisory Control and Data Acquistion system
If data from different devices is the blood of ERAS, then Tango is the circulatory system. It does an excellent job of handling multiple devices (Motivity treadmill, Kinect Sensors, Blender Game Engine Instances, and in my case a ROS machine with Husky interfaces)

- Blender Game Engine to model the standalone V-ERAS application.

The V-ERAS simulation of the spacecraft looks like this -

In the second phase of the project, I will be involved in real-time streaming of rover stereo camera feed to the displays in the V-ERAS simulation.
- Python (of course :D )
![]()
- Ubuntu 14.04 (Trusty Tahr)
ROS Indigo offers complete support for this version of Ubuntu.

Screenshots
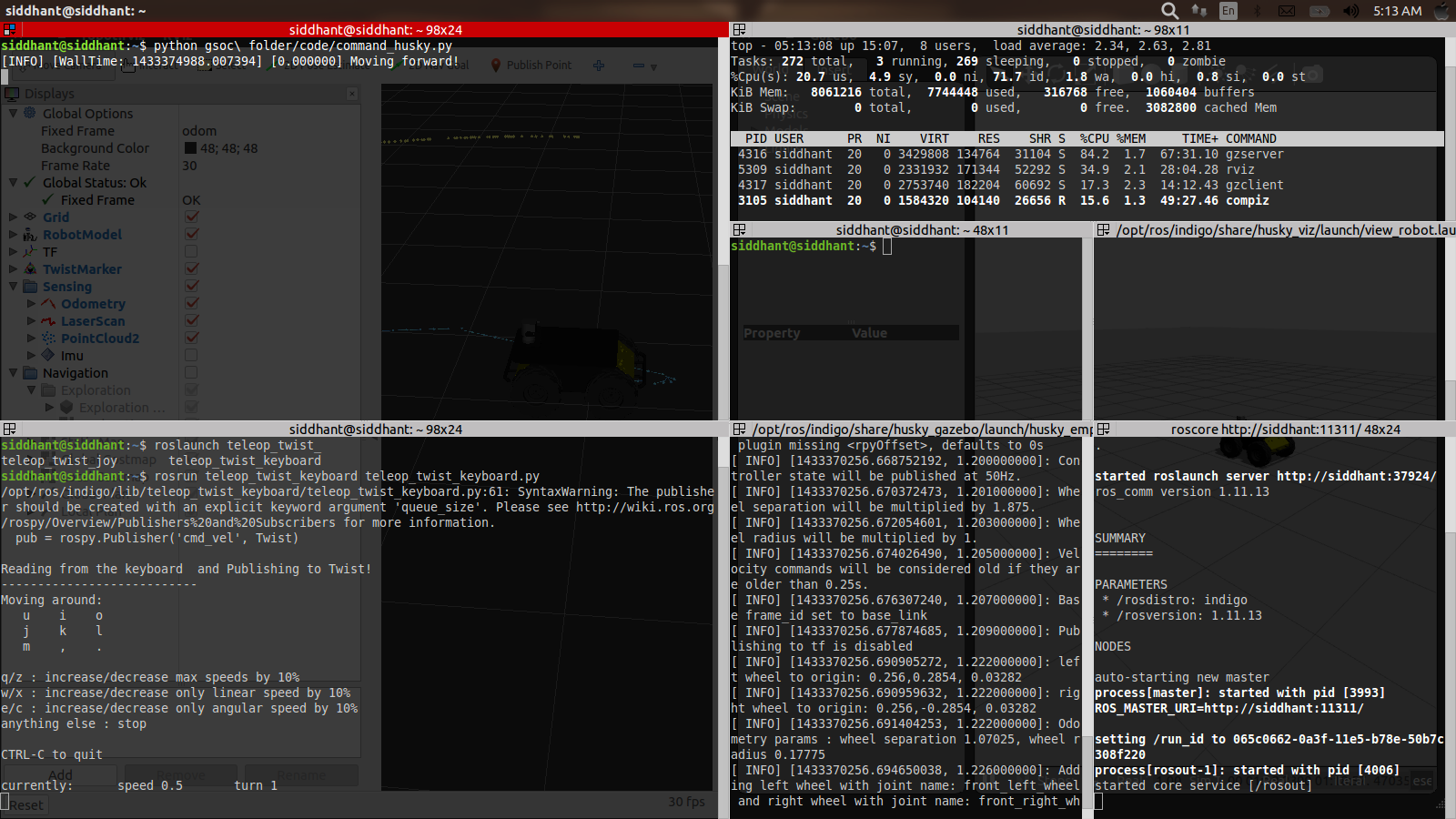
To Python-ify my experience even further, I installed Terminator, a Python-based program which makes terminal arrangement as flexible as humanly possible on Linux.
Working with ROS requires opening up a lot of terminal and Terminator makes this hassle-free.
Take a look for yourselves -
I am using different text editors for different purposes.
While working with Markdown and reStructuredText, I use Sublime Text.

Vim is my editor of choice for all things Python. I have been using it for open-source development since last year.
So, with this I wrap up this setup post.
Just for kicks, this is what my desktop looks like -
I must admit it keeps me motivated to design software for Mars missions. Just in case you’re wondering, the theme I use is the MacBuntu theme. It is pretty distraction-free.