Fine-tuning Telerobotics
Siddhant Shrivastava
August 07, 2015
Filed under “GSoC”
Hi! As discussed in the previous week, I have been able to get the integration of Telerobotics and Bodytracking up and running. Huge Victory :) Let me say the same thing in a much bolder typeface -
Integration Successful!
The following screenshot demonstrates what I’m talking about -
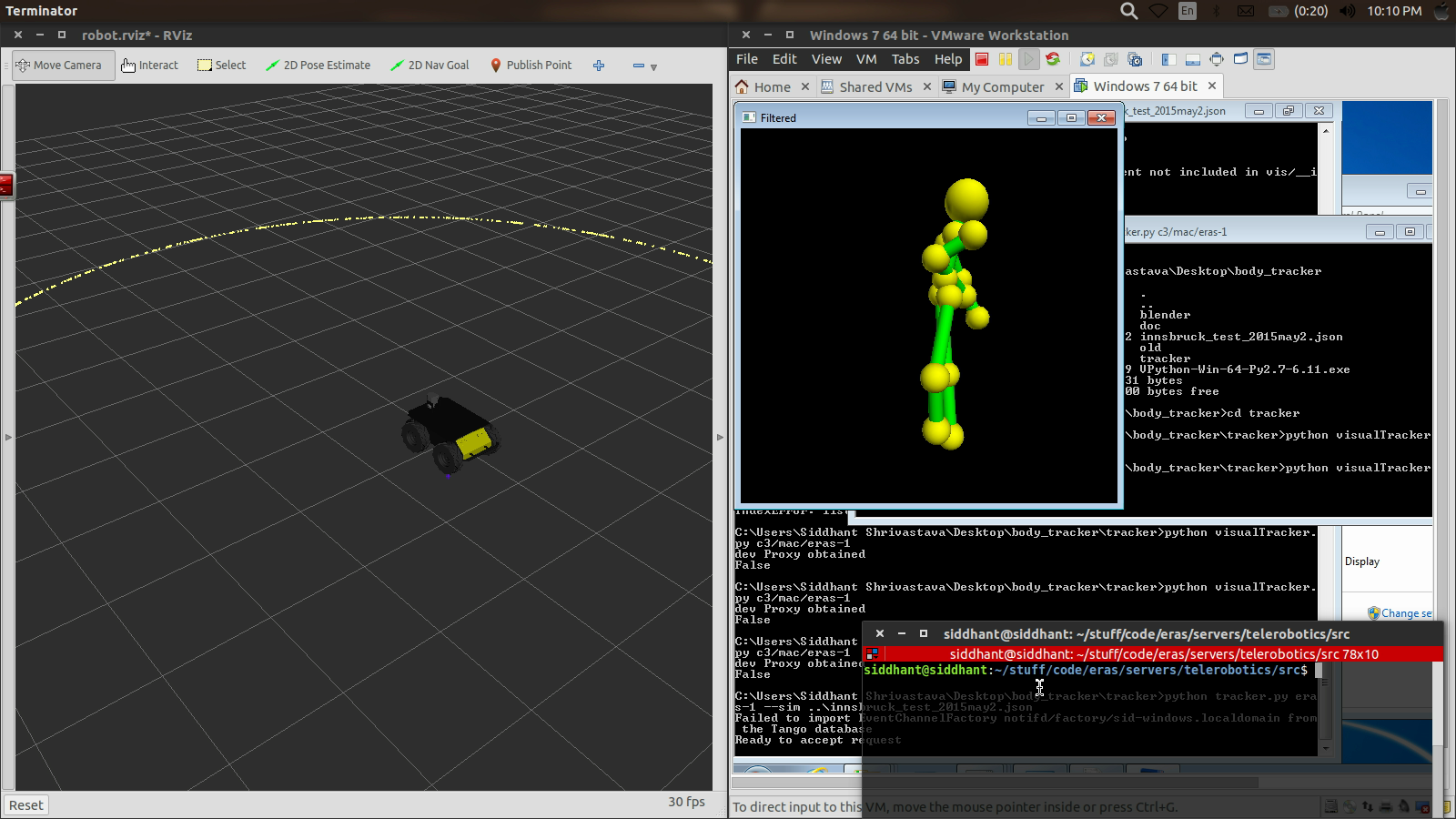
Screen recording - YouTube Video
I used the same tool for screen capturing this integration that I used for real-time streaming from a 3-D camera. The output is as follows -
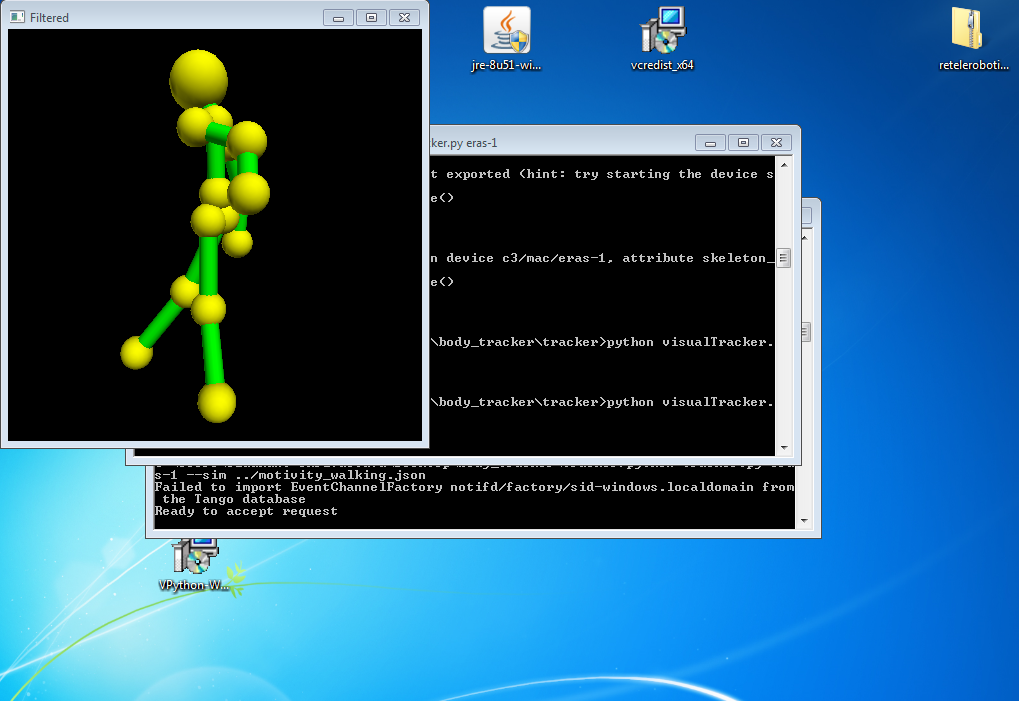
If my blogging platform is unable to embed the video on the page, you could use this link to watch the first version of Telerobotics and Bodytracking integration. The Visual Tracker designed by Vito looks like this -
Current Status
It is evident from the video that the setup is functional but not efficient. Moreover, it is buggy. The velocity values are way off the mark that ROS can take which results in jerks in Husky’s motion. Also there is a disparity between the refresh rates of ROS and Tango-Controls which is identified by the Device not being unavailable intermittently.
I strongly hope I’ll be able to solve these issues in the next post. Of all the aha moments that I have been privy to, watching the Integration working was probably the biggest one of them all. It looks futuristic to me. With the Internet of Everything, a lot of things are going to use Teleoperation. I am so glad that we at the Italian Mars Society are gauging the future trends and experimenting with them in the present. I am honored to be facilitate that experiment.
My next post is surely going to be a much more exciting run-down on how Telerobotics progresses :)
Stay Tuned. Ciao!